Details
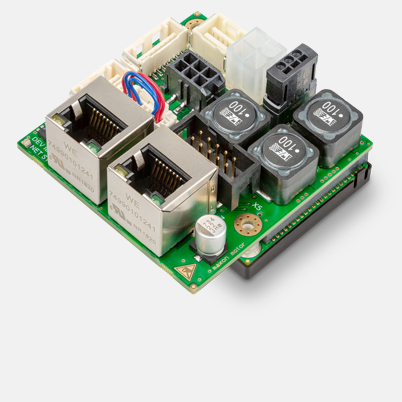
EPOS4 Compact 50/5 EtherCAT, digital positioning controller, 5 A, 10 - 50 VDC
Part number 628094
| Price scales | Quantity | Price per unit |
|---|---|---|
| Prices excluding VAT and shipping costs | 1-4 | $825.39 |
| 5-19 | $726.57 | |
| 20-49 | $624.38 | |
| from 50 | On request |
Specifications
| Product | |
| Weight | 76 g |
| Motor | |
| DC motors up to | 250 W |
| EC motors up to | 250 W |
| Sensor | |
| Without sensor (DC motors) | Yes |
| Digital incremental encoder (2-channel, single-ended) | Yes |
| Digital incremental encoder (2-channel, differential) | Yes |
| Digital incremental encoder (3-channel, differential) | Yes |
| Digital Hall sensors (EC motors) | Yes |
| SSI Absolut Encoder | Yes |
| Analog incremental encoder (2-channel, differential) | Yes |
| Operating modes | |
| Current controller | yes (Torque) |
| Speed controller (closed loop) | Yes |
| Position controller | Yes |
| Electrical data | |
| Operating voltage Vcc (min.) | 10 V |
| Operating voltage Vcc (max.) | 50 V |
| Logic supply voltage Vc (min.) | 10 V |
| Logic supply voltage Vc (max.) | 10 V |
| Max. output voltage (factor * Vcc) | 0.9 |
| Max. output current Imax | 15 A |
| Max. time of peak output current Imax | 3 s |
| Continuous output current Icont | 5 A |
| PWM clock frequency of power stage | 50 kHz |
| Sampling rate PI current controller | 25 kHz |
| Sampling rate PI speed controller | 2.5 kHz |
| Sampling rate PID positioning controller | 2.5 kHz |
| Max. efficiency | 97 % |
| Max. speed (DC) | 100000 rpm |
| Max. speed (EC; 1 pole pair) block commutation | 100000 rpm |
| Max. speed (EC; 1 pole pair) sinusoidal commutation | 50000 rpm |
| Built-in motor choke per phase | 10 µH |
| Inputs | |
| Hall sensor signals | H1, H2, H3 |
| Encoder signals | A, A\, B, B\, I, I\ |
| Max. encoder input frequency | 6.2 MHz |
| Sensor signals | A, A\, B, B\, I, I\, Clock, Clock\, Data, Data\ |
| Digital inputs | 8 |
| Functionality of digital inputs | limit switch, reference switch, general purpose, touch probe |
| Analog inputs | 2 |
| Resolution, range, circuit | 12-bit, -10…+10V, differential |
| Functionality of analog inputs | General Purpose, Set Value Current, Set Value Velocity |
| DIP switch | 6 |
| Functionality of the DIP switch | DEV ID, I/O-Pegel (TTL, PLC) |
| Outputs | |
| Digital outputs | 3 |
| Functionality of digital outputs | holding brake, general purpose |
| Analog outputs | 2 |
| Resolution, range | 12-bit, -4…+4V |
| Functionality of analog outputs | General Purpose |
| Voltage outputs | |
| Hall sensor supply voltage | see "Sensor supply voltage" |
| Encoder supply voltage | see "Sensor supply voltage" |
| Sensor supply voltage | +5 VDC, max. 100 mA |
| Auxiliary output voltage | +5 VDC, max. 145 mA |
| Interface | |
| USB (full speed) | Yes |
| EtherCAT | IEC 61158 Type 12 Slave |
| CoE (CAN application layer over EtherCAT) | CiA 402 |
| FoE (File transfer over EtherCAT) | Yes |
| Distributed Clocks Support | Yes |
| Variable PDO mapping | Yes |
| Display | |
| Status indicator "Ready" | green LED |
| Status indicator "Error" | red LED |
| Status indicator of communication interface | green LED |
| Protective functions | |
| Protective functions | current limit, overcurrent, excess temperature, undervoltage, overvoltage, voltage transients, short-circuits in the motor cable, loss of feedback signal |
| Ambient conditions | |
| Temperature – Operation (min.) | -30 °C |
| Temperature – Operation (max.) | 25 °C |
| Temperature – Extended Range | +25…+70 °C, Derating: -0.111 A/°C |
| Temperature – Storage (min.) | -40 °C |
| Temperature – Storage (max.) | 85 °C |
| Humidity (non-condensing) (min.) | 5 % |
| Humidity (non-condensing) (max.) | 90 % |
| Mechanical data | |
| Weight | 76 g |
| Dimension (length) | 55 mm |
| Dimension (width) | 56.5 mm |
| Dimension (height) | 31.7 mm |
| Mounting | mounting holes for M2.5 screws |
| Software | |
| Installation program | EPOS Setup |
| Graphical User Interface | EPOS Studio |
| Operating system | Windows 11, 10 |
| Windows DLL for PC | 32-/64-bit |
| Programming examples | MS Visual C#, MS Visual C++, MS Visual Basic, MS Visual Basic.NET, Borland C++, Borland Delphi, NI LabView, NI LabWindows/CVI |
| Linux Shared Object Library | X86 32-/64-bit, ARMv6/v7/v8 32-bit, ARMv8 64-bit |
| Programming examples | C++ |
| Functions | |
| CANopen Profile Position Mode | Yes |
| CANopen Profile Velocity Mode | Yes |
| CANopen Homing Mode | Yes |
| CANopen Cyclic Synchronuous Position | Yes |
| CANopen Cyclic Synchronuous Velocity | Yes |
| CANopen Cyclic Synchronuous Torque | Yes |
| Analog set value | Yes |
| Position Control Feed Forward | Yes |
| Velocity Control Feed Forward | Yes |
| Dual loop position and velocity control | Yes |
| Quickstop | Yes |
| Enable | Yes |
| Control of holding brakes | Yes |
| STO (Safe Torque Off) | yes (not certified) |
| Advanced automatic control settings | Yes |
Description
The EPOS4 Compact 50/5 EtherCAT is a dynamic, ready-to-connect positioning controller in a compact design. Designed for use with brushed DC motors with encoders and brushless EC motors (BLDC) with Hall sensors and encoders up to 250 W / 750 W.Downloads
Software/firmware
CAD-Files (DXF, STP,....)
Catalog page
Manuals
-
English
- EPOS4 Feature Chart (english, PDF 3 MB) Version 2025-06
- EPOS4 Firmware Specification (english, PDF 10 MB) Version 2025-05
- EPOS4 Communication Guide (english, PDF 5 MB) Version 2021-03
- EPOS4 Module-Compact 50/5 Hardware Reference (english, PDF 8 MB) Version 2025-01
- EPOS4 Application Notes Collection (english, PDF 18 MB) Version 2025-04
- EPOS4 Firmware Version Readme (english, PDF 529 KB) Version 2025-05
- EPOS4 ESI File (english, ZIP 1 MB) Version 0180h